Festos Handling für Montagevorgänge EXCH ist, bei vergleichbaren Einstandskosten, um 30% schneller als jedes konventionelle kartesische Handling.
Das Flächenportal EXCH von Festo kann nicht nur schnell und flexibel positionieren, auch der Arbeitsraum ist variabel und deckt die Fläche von zwei SCARA-Robotern ab. Es weist einen deutlich größeren Arbeitsraum in Rechteckform auf als Robotersysteme in Delta-Kinematik, welche nur kreisrunde bzw. SCARA-Roboter nur nierenförmige Arbeitsräume bearbeiten können. Dadurch wird die Wirtschaftlichkeit bezüglich der zu installierenden Masse von rund 150 kg und bezüglich des Platzbedarfs erhöht.
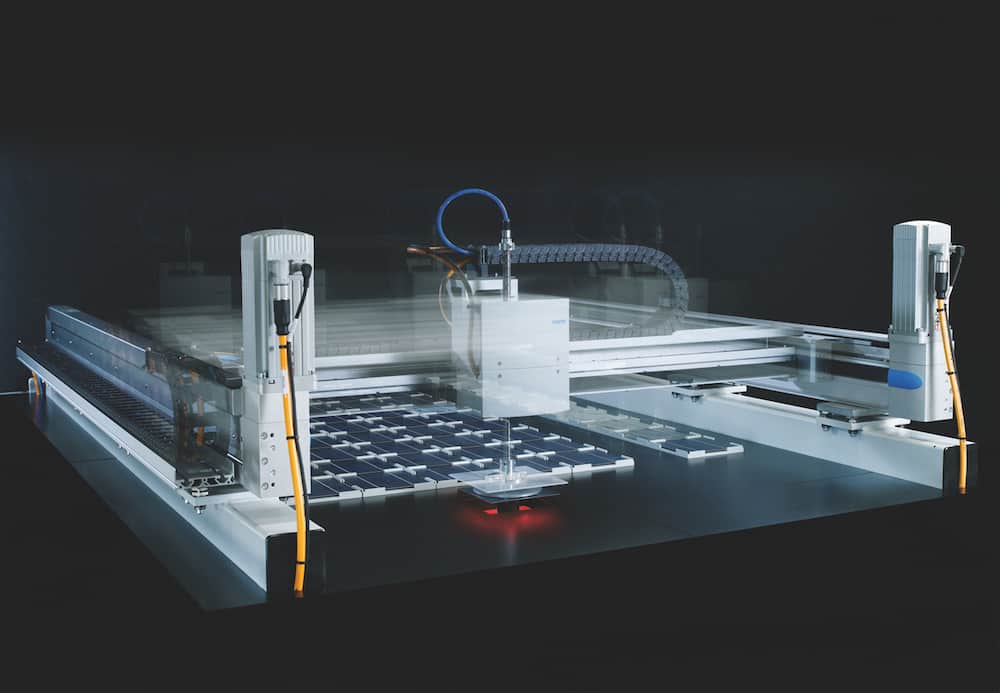
Festos Flächenportal weist einige Vorzüge auf: es ist sehr flach, hat einen niedrigen Schwerpunkt und ein einfacheres Gestell als Delta-Roboter. Das optimierte Beschleunigungs- und Abbremsverhalten ermöglicht eine Genauigkeit beim Saugen und Greifen von 0,1 mm. Die Geschwindigkeit von 5 m/s und die Beschleunigung von 50 m/s² erreicht das H-Portal über einen konstruktiven Kniff: Über einen einzigen umlaufenden Zahnriemen wird das Flächenportal über zwei fest montierte Servomotoren EMMS angetrieben. Dadurch muss in der X/Y-Fläche mit ihren zwei Freiheitsgraden kein Motor mit bewegt werden. Reduzierte Massen ermöglichen schnelle und dynamische Bewegungen und führen zu weniger Verschleiß.
Mit dem Steuerungssystem CMCA bekommen Anwender ein komplett anschlussfertiges Steuerungspaket für das Flächenportal EXCH – mit Achssteuerung, Motion Control 3D, Motorcontroller und Sicherheitskonzept. Diese unkomplizierte Lösung für komplexe und hochdynamische Handhabungsaufgaben kann ganz einfach mit nur einer Teilenummer (fürs Handlingsystem inklusive Steuerungssystem CMCA) bei Festo als Paket bestellt werden.